The Good Bad Robots
The Good Bad Robots
Robots will be ubiquitous in the near future, few people would argue against that, with some authors even talking of a “Cambrian Explosion of robotics” 1. This bigger presence of robots in our daily life has accelerated the subfield of roboethics 2, which is trying to establish how we must design, use and treat them.
The reader might be thinking why do we need roboethics if we have the Three laws of robotics, but as we will see, those laws aren’t enough, in fact, Asimov’s novels often talk about how those laws are broken or had to be modified. Besides, the type of robots and ethical problems that we face are far from Asimov’s laws for quasi-human robots. If not convinced yet, take the following cases of a bully and a “killer“ robot.
To perform drug screening tests researchers need subjects with that particular mental disorder in which to test them, this is the motivation that pushed Ishii et al. to develop their robot rat WR-3 3.
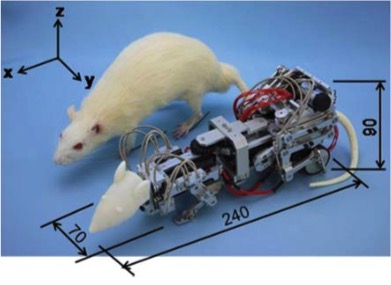
Their goal was to depress rats based on the stress-vulnerability hypothesis, which in a nutshell says that psychotic disorders are the result of stress on vulnerable subjects, in this case, WR-3 being the stressor.
WR-3 is 240 mm long and can mimic characteristic rat movements such as grooming or rearing. The movements of the robot rat are based on an algorithm with three modes of behavior: chasing, continuous attack and interactive attack.
In chasing mode the robot rat follows closely the real rat without touching it, in continuous attack will chase and hit continuously the other rat, and in interactive attack mode the robot rat will chase and hit the other rat for 5 seconds when the latter has moved more than a set distance. WR-3 is controlled externally by a computer vision system that tracks both rats.
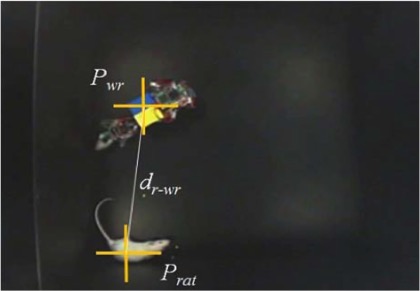
These behavior modes are used first to depress immature rats by exposing them to 10 minutes of continuous attacks for five consecutive days and later, when rats have matured, to test if they show signs of depression when exposed again to the stressor (either with continuous attacks or interactive attack), a condition necessary for a good depression model subject. Chasing mode is used to measure the level of depression in a similar way to the forced swim test does.
It is clear that these experiments have a noble goal that might be necessary for anti-depressant drug research, but it is difficult not to feel troubled by the use of machines to bully an animal in a more effective way.
Before going into a deeper discussion, let’s analyze next case of a “killer” robot, although not of humans, but of crown-of-thorns starfish (COTS), which is a pest of coral that feeds on it destroying also the ecosystem that depends on coral. COTS are present naturally on coral reefs but nutrient runoffs from farming and urban activities seem to have caused an increase in the outbreaks of COTS in the Australian’s Big Coral Reef.
Authorities of the Australian’s Big Coral Reef deal with outbreaks of COTS by regularly killing them with an injection of a biological agent applied manually by divers. This approach is not only expensive (divers and supporting boats) and time-consuming but, for safety reasons, divers can only dive in daylight with calm waters and for limited periods.
To overcome these problems, researchers of the Queensland University of Technology 4 have proposed a torpedo-shaped autonomous underwater robot to control the population of COTS. Equipped with a camera and a robotic arm mounted underneath, it will move around the corals detecting COTS and injecting them with a biological agent with little to no human intervention. The advantage of this system is not only that it can operate for longer hours, but also can provide more detailed information of its operation to make the population control of COTS more efficient.
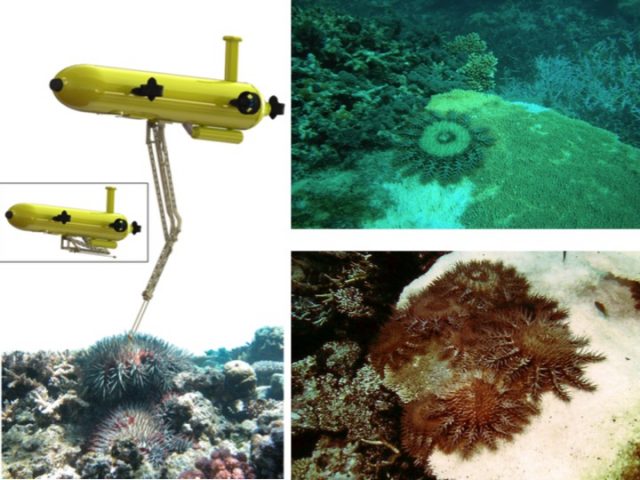
The system uses a combination of a Random Forest Classifier and Particle Filter that with high accuracy can detect and track COTS. This means that the robot learns what a COTS is and what is not using static images from videos taken by recreational divers and marine scientists. These images are both of COTS with different shapes, color and light conditions and of coral without COTS. When the computer vision detects a COTS it keeps track of its position as the robot (or image) moves so it can later inject the agent although in their paper they only presented the learning and tracking algorithm and not the visual servoing and performance of the robot in the wild.
What these examples show is that we don’t have to go to the extremes of military robots or advanced humanoids to face ethical dilemmas. They also prove that the Three laws of robotics aren’t enough to deal with the complexity of modern robotics. They are the precursor of roboethics and a good source for science fiction stories, but nothing more. After all, how could an underwater robot that only understands the world as COTS/Non-COTS prevent a human from drowning (harm), if it doesn’t even know what a human is?
Yet, it accepts that it is ethical to kill animals with autonomous machines; or rather their developers do, and this is perhaps the key point that roboethics tries to make, that as with many other disciplines, robotics is not separated from ethics and we must consider the ethical implications that pose the actions of the robots that we design.
Would it be ethical to use robots in a slaughterhouse? Would it be more inhuman or more human as it could reduce animal’ stress as it seems to be the case with cow-milking robots? Or is it only ethical to kill animals with robots if it is for pest control? Same as opponents of Lethal Autonomous Weapons Systems (LAWS) argue, will robots make it easier for humans to use animals for research because we are not the ones doing the dirty work?
There aren’t easy answers, and that might be a good thing because this isn’t a topic just for roboticists, but an interdisciplinary subject that needs input from all sides so in the future there will be only good robots, at least, that’s the goal of roboethics.
References
- Pratt, Gill A. 2015. “Is a Cambrian Explosion Coming for Robotics?” Journal of Economic Perspectives, 29(3): 51-60. ↩
- Veruggio, G., “The EURON Roboethics Roadmap” in Humanoid Robots, 2006 6th IEEE-RAS International Conference on, pp.612-617, DOI: 10.1109/ICHR.2006.321337 ↩
- Hiroyuki Ishii, Qing Shi, Shogo Fumino, Shinichiro Konno, Shinichi Kinoshita, Satoshi Okabayashi, Naritoshi Iida, Hiroshi Kimura, Yu Tahara, Shigenobu Shibata & Atsuo Takanishi (2013) “A novel method to develop an animal model of depression using a small mobile robot”, Advanced Robotics, 27:1, 61-69, DOI: 10.1080/01691864.2013.752319 ↩
- F. Dayoub, M. Dunbabin, P. Corke. “Robotic Detection and Tracking of Crown-of-Thorns Starfish”, IEEE/RSJ International Conference on Intelligent Robots and Systems, IROS 2015 ↩
1 comment
[…] Posted in Ethics, Humanities & Social Sciences, Noticias, Robotics, Technology | 0 comments […]