Shortcuts for efficiently moving a quadrotor throughout the Special Euclidean Group SE(3) (and 2)
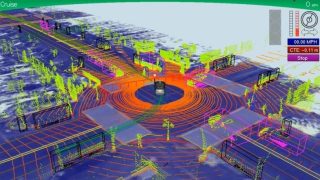
We devoted the first part of this article to introducing the problem of motion planning for autonomous vehicles at a qualitative level and to briefly describing two of the most commonly-used algorithms, RRT and RRT* . Next, we will continue getting into deeper mathematical details about the topological structure of the state spaces associated to […]